Un ejemplo de un sistema no invariante en el tiempo, en particular no LTI, es
\begin{equation*}
y(t)
\ = \
F_1[x(t)]
\ = \
\int_0^t \sqrt{x(\xi)}\dd\xi.
\end{equation*}
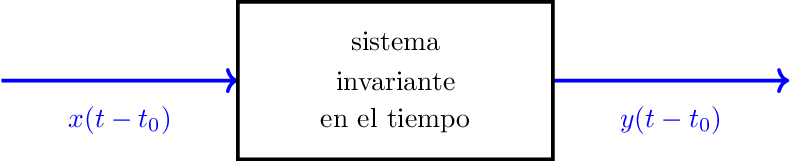
Para ver que el sistema no es invariante en el tiempo, reemplazamos \(x(t)\) por \(x(t-t_0)\) en el lado izquierdo y en el lado derecho por separado, y vemos si sale lo mismo.
En el lado derecho sale
\begin{align*}
F_1[x(t-t_0)]
&\ = \
\int_0^t \sqrt{x(\xi-t_0)}\dd\xi\\
&\ = \
\int_{-t_0}^{t-t_0} \sqrt{x(\eta)}\dd\eta
\end{align*}
Por otra parte, en el lado izquierdo sale
\begin{equation*}
y(t-t_0)
\ = \
\int_0^{t-t_0} \sqrt{x(\xi)}\dd\xi,
\end{equation*}
y estas expresiones no son iguales. Por tanto, el sistema \(F_1\) no es invariante en el tiempo.
Como ejemplo de un sistema que sí es invariante en el tiempo, escogemos
\begin{equation*}
y(t)
\ = \
F_2[x(t)]
\ = \
\int_{t-5}^t x(\xi)^2 \dd\xi.
\end{equation*}
Después de reemplazar \(x(t)\) por \(x(t-t_0)\text{,}\) el lado derecho es
\begin{equation*}
\int_{t-5}^t x(\xi-t_0)^2 \dd\xi
\ \stackrel{\eta=\xi-t_0}{=} \
\int_{t-5-t_0}^{t-t_0} x(\eta)^2\dd\eta,
\end{equation*}
mientras que el lado izquierdo es
\begin{equation*}
y(t-t_0)
\ = \
\int_{t-t_0-5}^{t-t_0} x(\xi)^2\dd\xi,
\end{equation*}
lo cual es la misma expresión. Por eso, el sistema \(F_2\) sí es invariante en el tiempo.