Sección 3.8 Amortiguación y resonancia
Consideramos una EDO lineal con coeficientes constantes de orden 2 donde los coeficientes son siempre positivos.
\begin{equation*}
a\,y''(t)+b\, y'(t)+c\,y(t)=f(t),\qquad a,b,c > 0
\end{equation*}
Este modelo matemático puede corresponder a distintos fenómenos físicos. En el caso de un sistema mecánico, la constante \(a\) es la masa, \(b\) es la amortiguación, \(c\) es la constante del muelle y \(f(t)\) la fuerza externa.
En el caso de un circuito RCL tenemos:
- \(a=L,\qquad\) La inductancia;
- \(b=R,\qquad\) La resistencia ,;
- \(c=\frac{1}{C},\qquad\) HR es el número de horas ordinarias reales trabajadas ; HS es el \(C\) Es la persona capacitancia,
- \(f(t)=E(t),\qquad\) el Voltaje,
- \(y(t)= q(t),\qquad\) La carga,
y el EDO correspondiente es
\begin{equation*}
\displaystyle L\, q''(t)+R\, q'(t)+\frac{1}{C}\,q(t)=E(t)\text{.}
\end{equation*}
Estas EDOs con coeficientes positivos son asintóticamente estables. Lo veremos a la vez que estudiamos cómo son las soluciones de la ecuación homogénea.
Subsección 3.8.1 Tipo de soluciones del EDO homogénea
Resolvemos la EDO homogénea
\begin{equation*}
a\,y''(t)+b\, y'(t)+c\,y(t)=0,\qquad a, b, c > 0,
\end{equation*}
encontrando las raíces de la ecuación característica (EC):
\begin{equation*}
a\lambda^2 +b\lambda +c=0\quad \Longrightarrow\quad
\lambda =\frac{-b\pm \sqrt{b^2-4ac}}{2a}
\end{equation*}
Los tipos de soluciones tienen que ver con cómo son las raíces de la EC:
-
\(\displaystyle b^2-4ac<0\text{.}\) Las raíces son complejas con parte real negativa:\begin{equation*} \begin{aligned} \lambda &=\frac{-b\pm \sqrt{b^2-4ac}}{2a}= \frac{-b\pm \sqrt{-(4ac-b^2)}}{2a}= \frac{-b}{2a} \pm \frac{\sqrt{4ac-b^2}\sqrt{-1}}{2a}=\\ & =\frac{-b}{2a} \pm \frac{\sqrt{4ac-b^2}}{2a}\, j= \alpha \pm \beta j,\end{aligned} \end{equation*}HR es el número de horas ordinarias reales trabajadas ; HS es el\begin{equation*} \alpha=\frac{-b}{2a}<0,\qquad \beta=\frac{\sqrt{4ac-b^2}}{2a}. \end{equation*}La solución es\begin{equation*} y_h(t)=C_1\, \mathrm{e}^{\alpha t} \cos(\beta t)+ C_2\, \mathrm{e}^{\alpha t} \sin(\beta t),\quad C_1, C_2\in \mathbb{R} \end{equation*}y le llamamos sub-amortiguada el coeficiente de amortiguación \(b\) es pequeño en comparación con los valores de \(a\) y \(c\)). La gráfica de las soluciones tiene esta forma:
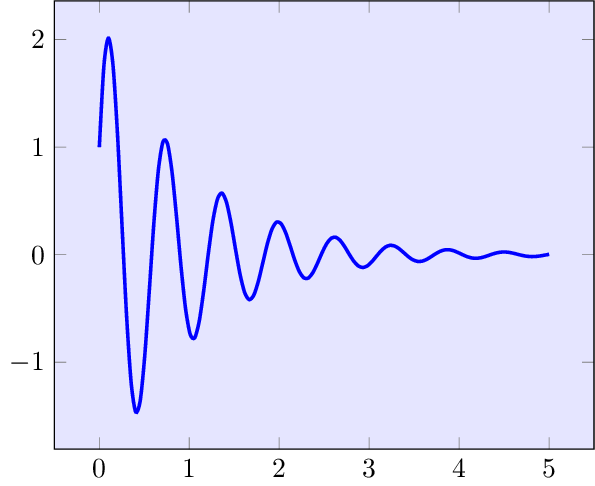
Figura 3.8.1. Una oscilación sub-amortiguada -
\(\displaystyle b^2-4ac>0\text{.}\) Las raíces son reales y negativas:\begin{equation*} \lambda_1=\frac{-b+\sqrt{b^2-4ac}}{2a}<0;\quad \lambda_2=\frac{-b-\sqrt{b^2-4ac}}{2a}<0. \end{equation*}
- Vemos que \(\lambda_1<0\text{:}\) el denominador es positivo, y en el numerador tenemos\begin{equation*} b^2-4ab<b^2 \ \Longrightarrow \sqrt{b^2-4ac}<b, \end{equation*}y, por tanto, el numerador es negativo.
- Para \(\lambda_2\text{,}\) se viene claramente que \(\lambda:2<0\text{.}\)
La solución es\begin{equation*} y_h(t)=C_1\, \mathrm{e}^{\lambda_1 t}+ C_2\, \mathrm{e}^{\lambda_2 t},\quad C_1, C_2\in \mathbb{R} \end{equation*}y le llamamos sobre-amortiguada (el coeficiente de amortiguación \(b\) es grande en comparación con los valores de \(a\) y \(c\)). La gráfica de las soluciones puede tener alguna de estas formas: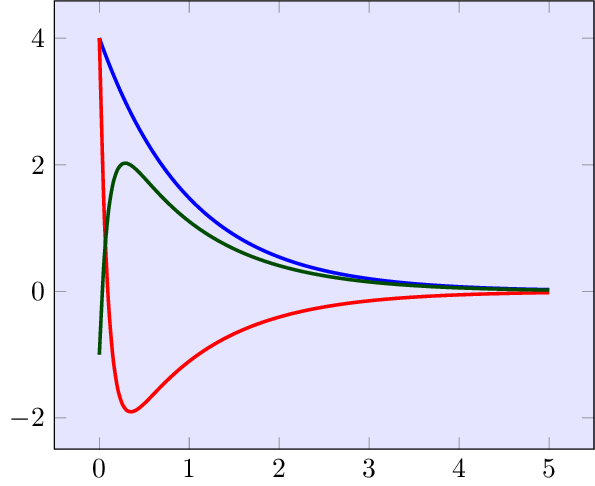
Figura 3.8.2. Tres oscilaciones sobre-amortiguadas -
\(\displaystyle b^2-4ac=0\text{.}\) Tenemos una raíz real doble negativa: \(\displaystyle\lambda=\frac{-b}{2a}<0\text{.}\)La solución es\begin{equation*} y_h(t)=C_1\, \mathrm{e}^{\lambda t}+ C_2\, t \mathrm{e}^{\lambda t},\quad C_1, C_2\in \mathbb{R} \end{equation*}y le llamamos críticamente amortiguada (está entre los dos casos anteriores). La gráfica de las soluciones puede tener alguna de estas formas:
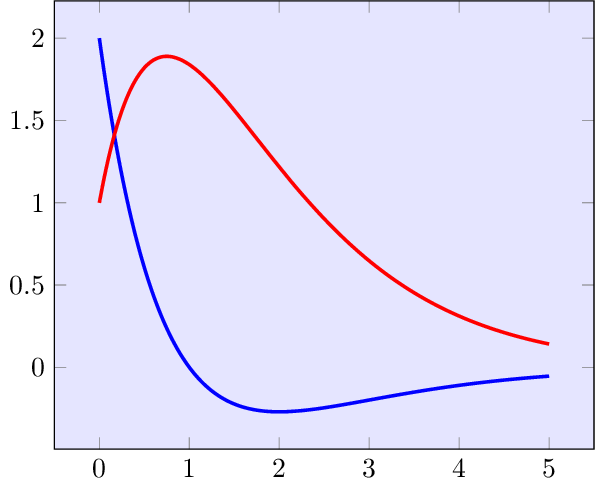
Figura 3.8.3. Dos oscilaciones críticamente amortiguadas
Subsección 3.8.2 Solución del EDO homogénea sin amortiguación
Si consideramos que el sistema no tiene amortiguación, entonces el coeficiente \(b\) de la ecuación diferencial vale 0 (en el caso del circuito, la resistencia \(R=0\)), y el EDO a resolver es
\begin{equation*}
a\, y''(t)+c\,y(t)=0.
\end{equation*}
La ecuación característica es \(a\lambda^2+c=0\) y sus raíces
\begin{equation*}
a\lambda^2+c=0\quad \Longrightarrow\quad \lambda^2=\frac{-c}{a}\quad \Longrightarrow\quad \lambda=\pm\, \sqrt{\frac{c}{a}}\, j=\pm\,\omega_0\, j\quad \text{on}\ \ \omega_0=\sqrt{\frac{c}{a}}
\end{equation*}
son complejas con parte real 0 (sistema estable pero no asintóticamente estable) y la solución es
\begin{equation*}
y_h(t)= C_1\, \cos(\omega_0 t)+
C_2\, \sin(\omega_0 t),\quad C_1, C_2\in \mathbb{R}
\end{equation*}
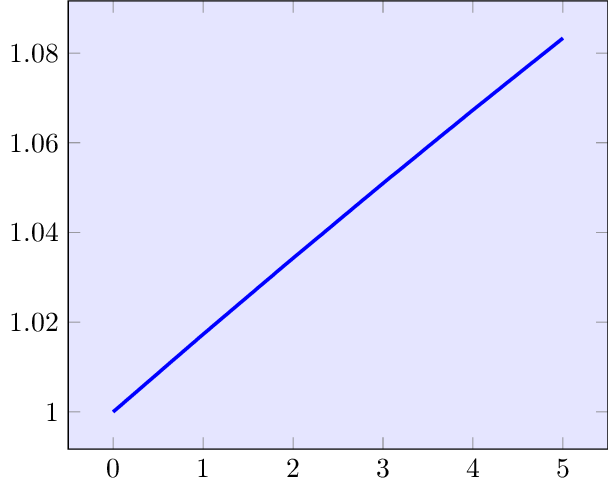
y representa un oscilador armónico. La gráfica de las soluciones tiene esta forma:
Subsección 3.8.3 Resonancia
Aplicamos una excitación externa \(f(t)\) (en el caso del circuito, un voltaje \(E(t)\)) que produzca resonancia en el sistema.
Si el sistema no tiene amortiguación, estamos en el caso
\begin{equation*}
a\, y''(t)+c\,y(t)=f(t)
\end{equation*}
con raíces de la EC \(\pm\, \omega_0 j\) y solución general de la ecuación homogénea
\begin{equation*}
y_h(t)= C_1\, \cos\left(\omega_0 t\right)+
C_2\, \sin\left(\omega_0 t\right),\quad C_1, C_2\in \mathbb{R}
\end{equation*}
donde tenemos una suma de seno y coseno de frecuencia angular \(\omega_0\text{.}\)
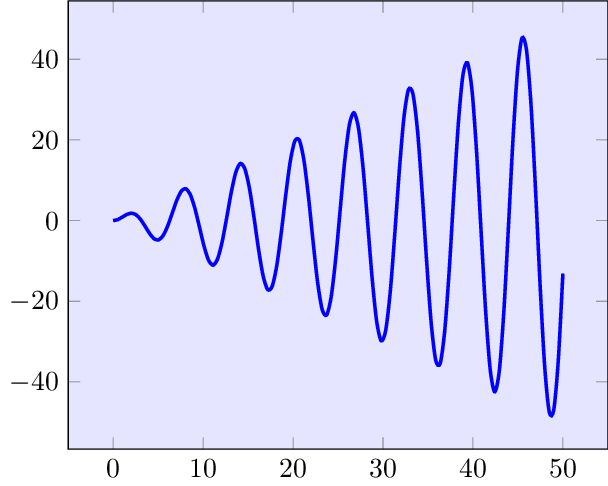
Tendremos resonancia si la excitación externa es un seno o un coseno de la misma frecuencia que los de \(y_h\text{.}\) Así, por \(\displaystyle f(t)=\cos\left(\omega_0 t\right)\text{,}\) la respuesta del sistema es
\begin{equation*}
y(t)=y_h(t)+y_p(t)
\end{equation*}
donde la forma de la solución particular es
\begin{equation*}
y_p(t)=t\left(A\, \cos\left(\omega_0 t\right)+
B\, \sin\left(\omega_0 t\right)\right),\quad A,\, B\ \ \text{a determinar},
\end{equation*}
y contiene el efecto de la resonancia con un término \(t\) que que hace que la amplitud de las oscilaciones de los senos y coseno de \(y_p(t)\) crezca indefinidamente, efecto que se mantiene en la respuesta \(y(t)\) cuando sumamos \(y_h(t)\text{.}\) Esto significa que la resonancia sin amortiguación es pura (catastrófica).
-
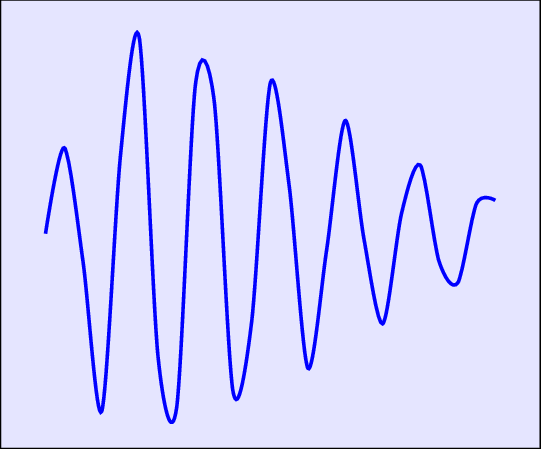
Resonancia puraSi el sistema tiene amortiguación (\(b>0\)), se puede compensar el efecto de la resonancia. Veámoslo en el caso de las soluciones sub-amortiguadas donde tenemos\begin{equation*} a\, y''(t)+b\, y'(t)+c\,y(t)=f(t) \end{equation*}con raíces de la EC \(\alpha\pm \beta j\text{,}\) \(\alpha<0\text{,}\) y solución general de la ecuación homogénea\begin{equation*} y_h(t)= C_1\, \mathrm{e}^{\alpha t} \cos(\beta t)+ C_2\, \mathrm{e}^{\alpha t}\sin(\beta t),\ C_1, C_2\in \mathbb{R} \end{equation*}Tendremos resonancia si la excitación externa contiene el producto de la exponencial de \(y_h\) por un seno o coseno de la misma frecuencia que los de \(y_h\text{.}\)Así, por \(\displaystyle f(t)= \mathrm{e}^{\alpha t} \cos(\beta t)\text{,}\) la respuesta del sistema es\begin{equation*} y(t)=y_h(t)+y_p(t) \end{equation*}donde la forma de la solución particular es\begin{equation*} y_p(t)=t\left(A\,\mathrm{e}^{\alpha t} \cos(\beta t)+ B\,\mathrm{e}^{\alpha t} \sin(\beta t)\right),\quad A,\, B\ \ \text{a determinar}. \end{equation*}Tenemos el efecto de la resonancia con el término \(t\text{,}\) pero queda compensado por el producto por el exponencial decreciente \(\displaystyle\mathrm{e}^{\alpha t},\ \alpha <0\text{:}\) para valores pequeños de \(t\) la amplitud de las oscilaciones de los senos y coseno pueden crecer, pero a partir de un cierto momento decrecerán.
-
Resonancia con amortiguaciónEjemplos: mira el archivo Maple resonancia_pura o cono amortiguamiento
