Toni Susin
Last modified 03/04/2013
Menu:
HYBRID DEFORMABLE MODEL: FEM and SPH
Researches: Máximo G. Mero, Antonio Susin.
 Description:
Description:
The interactive applications developed in a real virtual environment are important in the field of medicine or engineering. In this way, there are tools, such as surgery simulators, that allow simulation and animation of volumetric deformable objects which can be manipulated in this virtual environment and with a real time haptic performance. One of the main characteristics of these simulations is the dynamic interaction between the deformable model and the possible external forces acting on it.
Our deformable model is based on physical properties. It is essentially built on techniques presented in computer graphics and mechanical engineering literature [RD89], [DJAK87], [DA88]. The dynamic behavior of the volumetric 3D deformable model is based on linear elastic mechanics. For the simulation of deformable objects, one of the most usual numerical techniques is the Finite Element Method (FEM). O’Brien et al. [JJ99] and Debunne et al. [GMMA01] are good references about the continuous deformation problem in terms of FEM.Although [JJ99] is focused on the study of fractures of rigid materials, the elastic model can be used for simulating a major variety of deformable objects. It is known that [GMMA01] built a model for the human liver with the same finite element formulation. Also, a haptic model based on FEM has been implemented by Cotin et al. [SHN99] for surgical applications. Topics like precision and speed need to be properly balanced when their performance in a virtual reality environment is the principal application goal. The adequate solution for combining both characteristics is to build a multiresolution model [GMMA01].The structure of such a model is organized in different layers from coarse to finer mesh.
Computational accuracy depends on base functions and the number and size of the elements. When an external force is applied to the model in a delimited zone, the finer mesh is activated. The other resolutions are used to animate the model based on the distance from the force location and internal forces. The different multiresolution models differ according to the relation of two consecutive mesh levels. This can be obtained from a refinement of the previous given mesh level or from a completely independent mesh (just meshing the same volume). This relation is critical in the transition zone where the two different meshes are activated. The main drawback of this approach is the complex data structure needed for efficient
simulation. Another recent deformation model is based on considering a discretization of the continuous material by using particles. In this approach, the material is a system of particles that includes deformation properties and their relations with neighboring ones. Smooth Particle Hydrodynamics (SPH) was first introduced by physicists for accurate simulation of fluid dynamics [J.M92]. Then Desbrun and Cany [MM99] presented these techniques to be used in the field of computer graphics. Recent papers [DPM-99], [MRA-04], [S.F01], present new applications of the MFM (see [TH03] for a classification of MFM methods).
|


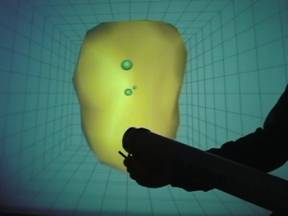
Fig 2. Workbench and Fokker Haptic Master device for interaction.
In the works mentioned above, FEM or MFM is used exclusively to build 3D deformable objects. Besides, the multiresolution approaches use only FEM to model the different levels of detail (LODs). The idea of coupling two different models is developed in [CDA00] for FEM and mass-spring. Our proposal defines a hybrid model to take advantage of both FEM and MFM methods ([MRA-04], [WMJ94]). Thus, the inner region of the object is modelled using a FEM coarse mesh that will be a fast model and the domain between the surface and the internal mesh is built using an MFM. The particles zone will be the one reacting directly to user interaction and the deformation obtained will be more realistic than the one achieved only using coarse linear finite elements. FEM and MFM are simultaneously activated in order to maintain the material properties along the deformation. In addition, a transition zone between the two models has to be stated and a similar formalism for both methods is used in order to assure continuity in the simulation. Our application has been implemented in an in-house designed workbench with a Fokker Haptic Master device for interaction.With this instrument the forces are computed according to the reaction of the model when the user interacts with the virtual object.
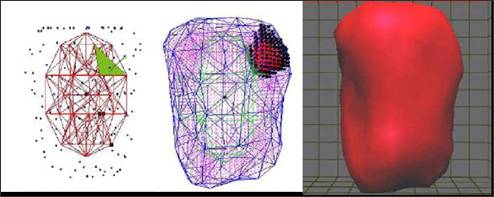
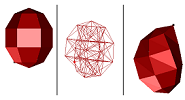
Fig.3. Hybrid deformable model
A new hybrid approach for deformable models is presented here and carried out in a virtual reality environment, achieving real time performance with haptic interactions. Our implementation consists in using two approaches for the deformable model. The deformation is modelled using simultaneously a Finite Element Method and a Mesh
Free Method. With this Mesh Free method, particles are used to simulate large deformations in the volume region near the surface of the object. The remaining internal volume of the object can be modelled employing a coarse mesh using the Finite Element Method.

Mero M.G., A. Susín. Deformable Hybrid Approach for Haptic Interaction.
3rd. Workshop in Virtual Reality, Interactions, and Physical Simulations (VRIPHYS'06). Editors C. Mendoza, I. Navazo. Proc. VRIPHYS'06. Eurographics Ed., pp 8-16 (2006).(PDF 415Kb)

Mero M.G., A. Susin. Deformable Hibrid Model for Haptic Interaction. Actas XV Congreso Español de Informática Gráfica (CEIG'2005). Editores J. Regincós, D. Martín. Ed. Thomson- Paraninfo, pp 237-240, 2005 (ISBN: 84-9732-431-5).(PDF 1.2Mb)

Mero M. G., Susín A. 3D Deformable Multiresolution Interactive LV Model.
IEEE Computers in Cardiology 2002. Ed. A. Murray A vol. 29,pp 617–620 (2002) (PDF 141Kb)
Mero M. G., Susín A. Deformable 3D Objects for a VR medical application.
3es. Jornades de Recerca en Enginyeria Biomèdica. Lacroix D., Ginebra M.P. ed pp.264--269 (2002)
Xarxa Temàtica en Enginyeria Biomèdica (ISBN 84-699-8705-4). Vic (Spain) (PDF 144Kb)
References:
[AS00] A.HUERTA, S.FERNÁNDEZ: Enrichment and coupling of the finite element and meshless methods. Int. Jour. for Numerical Methods in Engineering 48 (2000), 1615 – 1636.
[BT57] B.ALDER, T.WAINWRIGHT: Phase transition for a hard sphere system. J. Chem. Phys 27, 5
(1957), 1208–1209.
[CDA00] COTIN S., DELINGETTE H., AYACHE N.: A hybrid elastic model allowing real-time cutting, deformations and force-feedback for surgery training and simulation. The Visual Computer 16, 8 (2000), 437–452.
[DA88] D.TERZOPOULOS, A.WITKIN: Physically based models with rigid and deformable components.
IEEE Computer Graphics and Aplications 8, 6 (1988), 41–51.
[DJAK87] D.TERZOPOULOS, J.PLATT, A.BARR, K.FLEISCHER: Elastically deformable models. ACM, Proceedings of SIGGRAPH 87 4 (1987), 205 – 214.
[DPM-99] D.STORA, P.AGLIATI, M.CANI, F.NEYRET, J.GASCUEL: Animating lava flows. In Proc. Graphics Interface’99 (1999), pp. 203–210.
[GMMA01] G.DEBUNNE, M.DESBRUN, M.CANI, A.BARR: Dynamic real-time deformations using space & time adaptive sampling. In SIGGRAPH ’01 Conf. Proc. (New York, NY, USA, 2001), ACM Press, pp. 31–36.
[JBM77] J.MCCAMMON, B.GELIN, M.KARPLUS: Dynamics of folded proteins. Nature 267, 1 (1977), 585–590.
[JJ99] J.O’BRIEN, J.HODGINS: Graphical models and animation of brittle fracture. In SIGGRAPH’ 99 Conf. Proc. (1999), 137 – 146.
[J.M92] J.MONAGHAN: Smoothed particle hydrodynamics. Annu. Rev. Astron. and Astrophysics 30 (1992), 543 – 574.
[L.L77] L.LUCY: A numerical approach to the testing of the fission hypothesis. The Astronomical J. 82 (1977), 1013 – 1024.
[MM99] M.DESBRUN, M.CANY: Space-Time Adaptive Simulation of Highly Deformable Substances. Tech. Rep. 3829, INRIA, 1999.
[MRA¤04] M.MÜLLER, R.KEISER, A.NEALEN, M.PAULY, M.GROSS, M.ALEXA: Point based animation of elastic, plastic and melting objects. In Proc SCA ’04 symposium on Computer animation (2004), ACM Press, pp. 141–151.
[PT01] P.BATCHO, T.SCHLICK: Special stability advantages of position Verlet over velocity Verlet in multiple time step integration. J.Chem. Phys. 15 (2001), 4019 – 4029.
[RD89] R.COOL, D.MALKUS: Concepts and applications of finite element analysis. In Concepts and applications of finite element analysis,Wiley J., Sons., (Eds.). 1989.
[RJ82] R.GINGOLD, J.MONAGHAN: Kernel estimates as a basis for general particle methods in hydrodynamics. J. Comput. Physics. 46 (1982), 429 – 453.
[SET02] STAHL D., EZQUERRA N., TURK G.: Bagof- particles as a deformable model. In Proc. VISSYM ’02 symposium on Data Visualisation (2002), pp. 141–150.
[S.F01] S.FERNÁNDEZ: Mesh-Free Methods and Finite Elements, friend or foe? PhD. Universidad Politecnica de Catalunya, Spain, 2001.
[SHN99] S.COTIN, H.DELINGETTE, N.AYACHE: Real-time elastic deformations of soft tissues for surgery simulation. IEEE Transactions on Visualization and Computer Graphics 5, 1 (1999), 62 – 73.
[TH03] T.FRIES, H.MATTHIES: Classification and Overview of Meshfree methods. Tech. Rep. 2003-3, Institute of Scientific Computing Technical University Braunschweing. 2003.
[WMJ94] W.ATTAWAY, M.EINSTEIN, J.SWEGLE: Coupling of smooth particle hydrodynamics with
the finite element method. Nuclear Engineering and Design 150 (1994), 199 – 205.
[Y.F65] Y.FUNG: Linear elasticity. In Foundations of Solid Mechanics, Inc. P. H., (Ed.). Englewood Cliffs, N.J, 1965.